


1前言
從20世紀80年代初開始,我國國民經濟迅速而穩步增長,各類工業得到了迅速發展,但各類危險場所的火災以及由火災引發的爆炸傷人事故也隨之不斷發生,已成為現代火災撲救的一大難題。另外,化學危險品泄漏伴隨的毒性、腐蝕性給消防人員的自身安全帶來了嚴重的威脅,在沒有對現場進行充分偵檢和分析的情況下,盲目地采取行動,不僅不能取得預期的效果,而且往往會造成無辜生命的犧牲,付出慘重的代價。
2消防人員搶險救援時的弊端
目前我國消防部隊在災害現場展開搶險救援戰斗時,首先要派偵查人員偵查災害現場,了解災害現場情況后方可作出處置決策。由于采用人工偵察手段,必然存在下述問題:
(1)偵察小組(一般由2—3人組成)之間常用通訊繩作為聯絡手段,相互交流困難;
(2)消防人員在有毒、有害、缺氧、濃煙、放射性等室內外危險災害現場進行偵察,有可能造成中毒、窒息等事故;
(3)消防人員在易坍塌建筑物、大型倉庫堆垛等災害現場進行偵察,有可能發生墜落或被坍塌物砸中,造成人身傷害事故;
(4)消防人員在進入不明情況的災害現場時,無法事先確定所佩戴的個人防護裝備和偵檢設備是否安全合理;
(5)消防人員配備的便攜式探測裝備數量有限,無法實時定量的探測災害現場各種數據參數;
(6)消防人員偵察到的現場情況,無法在第一時間向后方指揮員報告;
(7)由于消防人員穿著防護服裝、配備防護裝備,本身負荷已較重,再要進行如清障、開關閥門、搶救遇難人員等工作具有一定困難;
(8)消防人員受環境影響及個人防護裝備的限制,在災害現場的滯留時間一般小于30min。
因此,研究一種實用的能替代消防救援人員遙控進入有毒、有害(非易燃易爆)、易坍塌建筑物、大型倉庫堆垛、缺氧、濃煙、放射性等室內外危險災害現場進行探測的消防救援機器人,來解決有關消防人員人身安全、時間限制、數據采集量不足和不能實時反饋等問題,是非常緊迫和必須的。
消防救援機器人具有可靠的偵檢和救援功能,以及良好的機動性能,對化學、生物、放射性等危險晶的生產、運輸、貯存和使用場所的災害預防,對有毒、有害化學物品泄漏(非易燃易爆)、易坍塌等災害現場的偵察和處置、易爆物品的搬運,障礙物的清除、遇難人員的搶救等工作起到重要的作用。將能替代消防人員進行現場搶險救援,對災害現場的滅火、封堵、洗消、破拆等救援作業的展開具有十分重要的作用。
3國外消防救援機器人發展情況
消防救援機器人的研究開發及應用,日本最為領先,其次是美國、英國和俄羅斯等發達國家。國際上對消防救援機器人的研究,在控制技術上可分為三個階段:第一代是遙控消防救援機器人,第二代是具有感覺功能的計算機輔助遙控消防救援機器人,第三代是自適應智能化消防救援機器人。第一代和部分第二代消防救援機器人已開始服役,但其結構和功能在各個國家都各有特點和獨到之處。目前發達國家正在加快開發不同功能的第二代實用型消防救援機器人,而第三代智能型消防救援機器人尚在探索之中,日本、美國和英國已開始進入預研和論證階段。
4消防救援機器人主要結構
消防救援機器人主要由行走系、機械手、救援拖斗和電液控制系統等結構組成。
4.1行走系
行走系一般分為履帶行走系和輪胎行走系兩種,本文就履帶行走系作一個簡單的介紹。履帶行走系包括機架、行走裝置和懸掛三大部分。
機架是整機的骨架,用來安裝所有的總成和部件,使整機成為一個整體。行走裝置是用來支撐機體,把發動機的動力傳到驅動輪上的驅動扭矩和旋轉運動轉為消防救援機器人工作與行駛所需的驅動力和前、后運動。懸架是機架和行走裝置之間互相傳力的連接裝置。履帶行走裝置由履帶、驅動輪、支重輪、托輪、引導輪和履帶張緊裝置等組成,驅動輪通過液壓馬達驅動,當驅動輪被最終傳動二級被動齒輪帶動時,其輪齒拉緊履帶,地面立即產生了作用在履帶上的反作用力,使整機對地面產生前或向后的運動,整機也隨之運動。履帶行走裝置比輪胎的接地面積大,接地比壓小。履帶所支撐的整機重量都是附著重量,而且在履帶的支撐面上大多制有履刺,可增加摩擦力,因此比輪胎式行走裝置
的附著牽引性能和通過性能都有所提高,具有良好的越野性能。
4.2機械手
機械手作為消防救援機器人的執行機構,主要起到抓取可疑物,開啟閥門,起吊受傷人員的作用。根據人手臂運動的原理以及目前機械手應用的資料,三節臂桿6個自由度的機械手工作裝置是最有前途的。
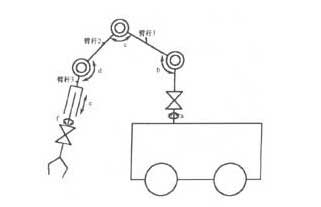
圖2
如圖2機械手自由度示意圖所示,機械手,自由度為本身旋轉的自由度,b自由度為臂桿1上下轉動的自由度,c自由度指的是臂桿2以臂桿1的縱向軸線為中心轉動的自由度,d自由度指的是臂桿3以臂桿2的縱向軸線為中心轉動的自由度,e自由度為伸縮臂桿3的平移自由度,f為機械手爪以臂桿3縱向軸線為中心旋轉的自由度。
機械手爪需要模擬人手的特征,在抓握的過程中知道獲得應有的抓握力。所以考慮在手爪的指或者內部安裝觸覺傳感器。手爪產生的抓握力在垂直方向上產生摩擦力,摩擦力阻止被抓取物由于重力的下落,當手爪與被抓取物之間產生滑動,觸覺傳感器傳送信號使控制系統增加抓握力,直到滑動停止,同時手爪還有彌補滑動位移的措施。
救援機器人需要將受傷人員舉起送到救援拖斗上,機械手設計最小的抓舉力一般為90kg,采用液壓控制技術,機械手運動精度通過液壓伺服系統來控制。
4.3救援拖斗
救援拖斗在消防救援機器人中是不可缺少的一部分,它類似于火場救援時使用的擔架,在火場中,消防救援機器人利用機械手將受傷人員轉移到救援拖斗上,通過電液控制將拖斗移動到機器人機體內,然后消防救援機器人返回后方以便受傷人員得到及時的救助。同時救援拖斗在微小空間內還集成了供氣系統,為受傷人員提供新鮮的空氣。在救援拖斗的設計中,應該考慮以下方面:
(1)根據擔架資料,一般的擔架展開后外型尺寸(長*寬*高)為2200mm*550mm*l50mm,考慮
到機器人為違程遙控工作以及受傷人員需移動到機器人機體內,因此救援拖斗的尺寸應該適當的放大,必須保證受傷人員在機體內的寬度和高度,救援拖斗設計時,拖斗尺寸一般為(長*寬*高)2200mm*700mm*300mm左右;
(2)考慮行走過程中救援拖斗的平穩性,消防救援機器人在行進過程中上下顛簸和機器人啟動剎車、加速減速產生的震動作用于被受傷人員,給受傷人員特別是骨折病人或外傷病人造成痛苦,并帶來種種不安全因素,拖斗必須有一定的減震裝置,來減少救援機器人行走時的震動;
(3)救援拖斗的防滑性能,救援拖斗在空間呈一定角度放置,沒有安裝綁帶裝置,考慮到有些受傷人員處于昏迷狀態,無法控制自己身體的滑移,必須有一定的防滑性能,以確保轉送安全。
4.4電液控制系統
消防救援機器人的電液控制系統是由操作人員手持無線發射器發出控制信號給電控系統,電控系統接收到指令后對液壓元器件進行控制,實現消防救援機器人的各項功能。
(1)無線遙控及原理
消防救援機器人控制系統采用非交流電動力和先進的無線控制技術,功能強大、體積小巧的可編程序控制技術組成,主要有無線遙控、電控箱等設備。控制系統由無線控制發射器、無線控制接收器、可編程控制器PLC、測速傳感器、測溫傳感器、油門位移傳感器及執行機構等設備組成。圖3控制系統框圖如下:
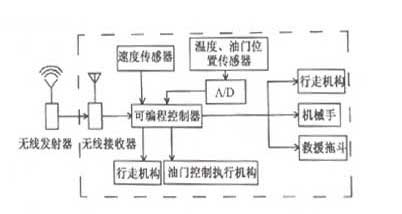
圖3
圖3中虛線框為電控箱控制功能框圖,無線發射器由控制人員手持。無線發射器能發出控制消防救援機器人所具備功能的全部動作信號而且控制半徑不大于150m,可使操作者在消防救援機器人后150m遠處遙控操作,電控箱中的可編程控制器能接收無線接收器發出的全部控制信號并根據不同的信號執行相應指令,并實時監控消防救援機器人的工況,使執行機構正確的作出相應動作。
(2)液壓控制技術
消防救援機器人液壓系統一般采用雙泵系統。雙泵液壓系統實際上是兩個單泵系統的組合。每臺泵各自供給回路中的執行元件。泵的功率是由各自回路所需的功率而定的,這樣可以保證復合動作。當系統中只需要進行動作而又要充分利用發動機功率時,可采用合流供油方式,即將兩臺液壓泵的流量同時供給一個執行元件,這樣可使執行機構的運動速度提高一倍,該種雙泵液壓系統在機器人中已被廣泛應用。
(3)功率利用和功率分配
消防救援機器人的各執行機構能力是錯綜復雜的,柴油機后面還有液壓泵,液壓泵對柴油機功率的利用與傳遞,將對消防救援機器人的各項能力起決定性的作用,不能單純由柴油機功率來決定。在執行工況時,液壓系統還有發熱、壓力能以及功能等各種形式的能量損失,功率利用要盡量減少這些損失,并充分利用與傳遞發動機的有效功率。在功率利用方面,雙泵變量系統要優于雙泵定量系統,總功率變量系統要優于分功率變量系統。此外,采用合流也是提高功率利用的一個途徑。執行機構分組的合理與否,對改善功率利用也是一個重要方面,因為執行元件的分組,將牽涉到雙泵之間的功率分配,根據救援機器人在機械手工作中要求機械手爪與小臂同時動作,在小臂提升與回轉過程中又要求動臂缸和回轉馬達同時動作的工作要求,采用兩個功率相同的液壓泵,分別向兩個回路供油的系統。
5結束語
消防救援機器人采用履帶行走系,接地面積大、接地比壓小,能在惡劣環境條件下進行有效的工作,能實現原地轉彎和良好的越野性能。消防救援機器人控制系統采用交流電動力和先進的無線控制技術。整機液壓驅動,實現無級調速,具有過負荷保護能力,提高了消防救援器人的使用效果。 (來源:《消防技術與產品信息》 消防天下)



